
- 별도 컨트롤러 없이도 인간-기계 상호작용 시스템 구현 가능성
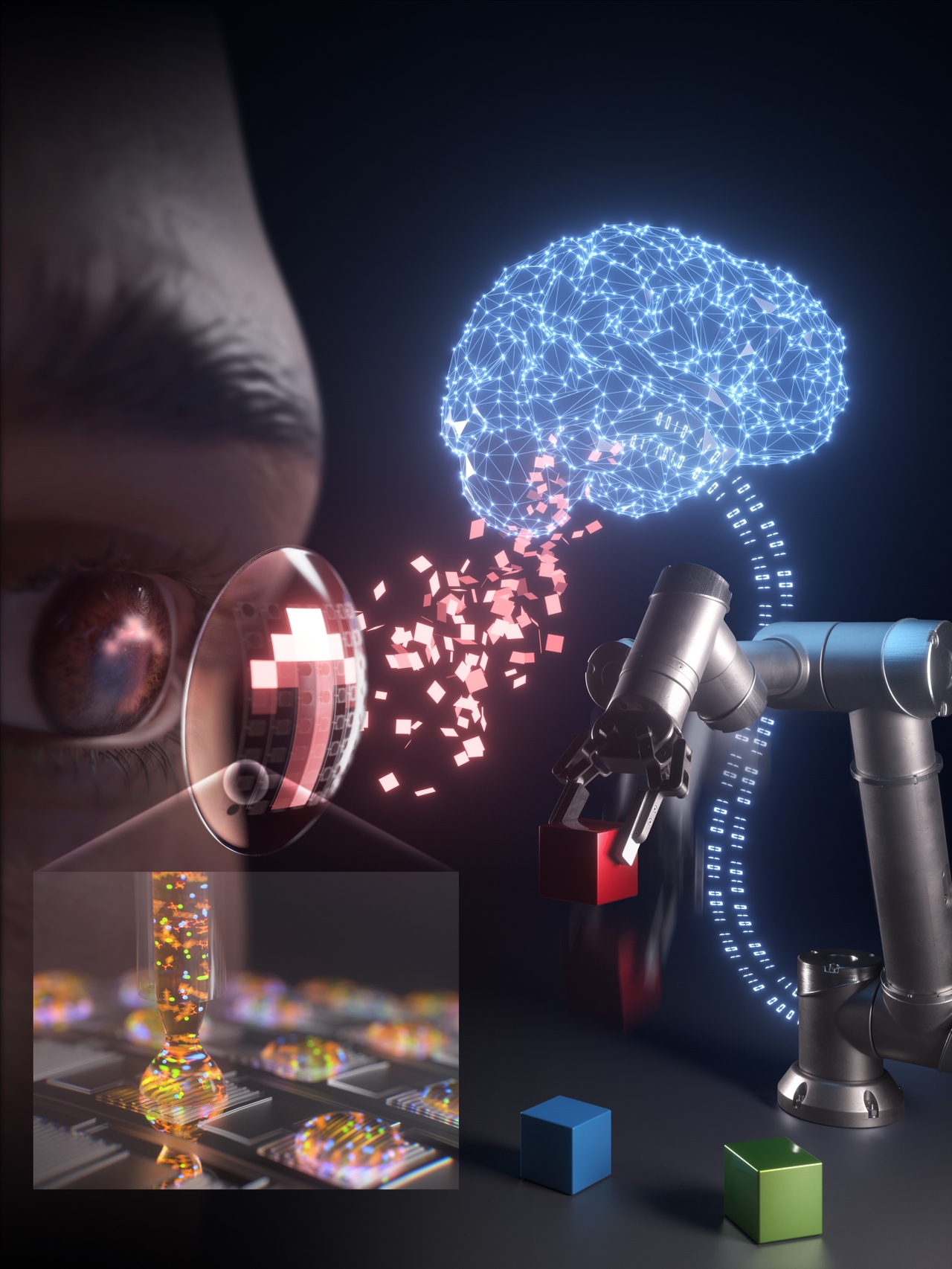 |
| 눈동자의 움직임으로 로봇을 제어하는 콘택트렌즈 개념도.[UNIST 제공] |
[헤럴드경제=구본혁 기자] “렌즈를 끼고 안구를 굴렸더니 로봇팔이 스스로 움직인다.”
UNIST(울산과학기술원) 기계공학과 정임두 교수 연구팀은 센서를 렌즈에 직접 인쇄하는 특수 기술과 센서의 저해상도 신호를 고해상도로 복원하는 AI 기술을 결합, 로봇 팔을 원격 제어할 수 있는 스마트 콘택트렌즈를 개발했다고 15일 밝혔다.
이 렌즈 위에는 100개(10×10)의 빛 검출 센서가 집적돼 있는데, 눈을 움직일 때마다 달라지는 빛 분포를 이 센서가 읽어내 시선 방향을 추적하는 원리로 작동한다. 위·아래·좌·우는 물론 대각선 방향까지 구분할 수 있으며, 이 시선 정보가 로봇 팔로 전달돼 팔이 움직인다. 안구의 깜박임으로 물건을 집을 수도 있다.
연구진은 둥근 렌즈 표면에 센서를 직접 프린팅할 수 있도록 ‘메니스커스 픽셀 프린팅(MPP)’ 기술을 개발해 적용했다. 노즐 끝에 맺힌 센서 원료 잉크를 렌즈 표면에 콕콕 찍어내는 형태의 기술이다. 메니스커스는 액체의 볼록하거나 오목한 곡면을 말하는데, 이 곡면 덕분에 잉크가 배출되는 힘과 잉크 퍼짐을 막는 힘이 균형을 이뤄 잉크를 원하는 양만큼 찍어낼 수 있다. 잉크를 건조하면 빛을 감지하는 페로브스카이트 물질만 남아 센서 역할을 하게 된다.
일반 센서 제작과 달리 센서 패턴을 새기기 위한 마스크가 필요 없고 다양한 안구 곡률에 맞춰 센서를 인쇄할 수 있어 개별 맞춤형 렌즈를 만들 수 있는 장점이 있다.
신호 해상도가 떨어지는 문제는 인공지능 기술을 결합해 해결했다. 실제 100개의 센서가 있지만, 딥러닝 기반의 초해상도 기술을 적용하면 최대 6400개(80×80)의 센서가 있는 것과 같은 신호 데이터를 얻을 수 있다.
 |
| 이번 연구를 수행한 UNIST 정임두(왼쪽부터) 교수, 공병훈·김도현 연구원.[UNIST 제공] |
안구 모형을 이용한 실험에서, 눈동자 움직임만으로 물체를 집어 옮기는 동작까지 이뤄졌으며, 방향 인식 정확도는 99.3% 수준을 기록했다.
정임두 교수는 “별도의 컨트롤러 없이도 인간의 시각 정보를 로봇 제어 신호로 직접 변환하는 고도화된 인간-기계 상호작용(Human-Robot Interaction, HRI) 시스템 구현이 가능함을 증명했다”며 “차세대 초경량 XR 인터페이스 장치로서 눈의 움직임만으로 다양한 전자 기기를 정밀하게 제어할 수 있다는 점에서, 증강현실 기반 산업용 로봇 원격 제어, 재난·재해 환경에서의 탐사 로봇 운용, 국방 분야의 무인체계 및 드론 조종, 의료 및 재활 지원 시스템, 스마트 모빌리티 인터페이스 등 다양한 분야로 확장될 수 있는 잠재력을 지닌다“고 밝혔다.
이번 연구결과는 재료 과학 분야 국제학술지 ‘어드밴스드 펑셔널 머티리얼즈(Advanced Functional Materials)’에 3월 11일 게재됐다.










