
산업 현장 투입 전제로 설계
전신에 동일 부품 사용
유지보수 효율↑
24시간 공장 가동 목표
배터리 충전 대신 교체
 |
| 보스턴다이나믹스의 휴머노이드 로봇 ‘아틀라스’의 얼굴. 눈·코·입 대신 빛으로 상태를 표시하는 원형 라이트 링으로 설계했다. [보스턴다이나믹스 제공] |
[헤럴드경제=정경수 기자] “많은 기업이 공상과학(SF)에서 보던 로봇처럼 보이게 만들려 하지만 아틀라스는 다릅니다. 동반자가 아닌 산업 현장에서 일하는 기계로 설계됐죠.”
애런 애브로프 보스턴다이나믹스 산업디자인 총괄은 지난 18일(현지시간) ‘산업용 휴머노이드 디자인의 형태와 기능’을 주제로 연 웨비나에서 이같이 밝히며 산업 현장 투입을 전제로 아틀라스를 설계했다고 밝혔다.
지난 1월 세계 최대 전자·정보기술 박람회 ‘CES 2026’에서 아틀라스를 공개한 이후 아틀라스의 기능에 대해 공개적으로 설명한 것은 이번이 처음이다.
 |
| 보스턴다이나믹스의 휴머노이드 로봇 ‘아틀라스’가 자동차 조립 공정 작업을 하고 있다. [보스턴다이나믹스 제공] |
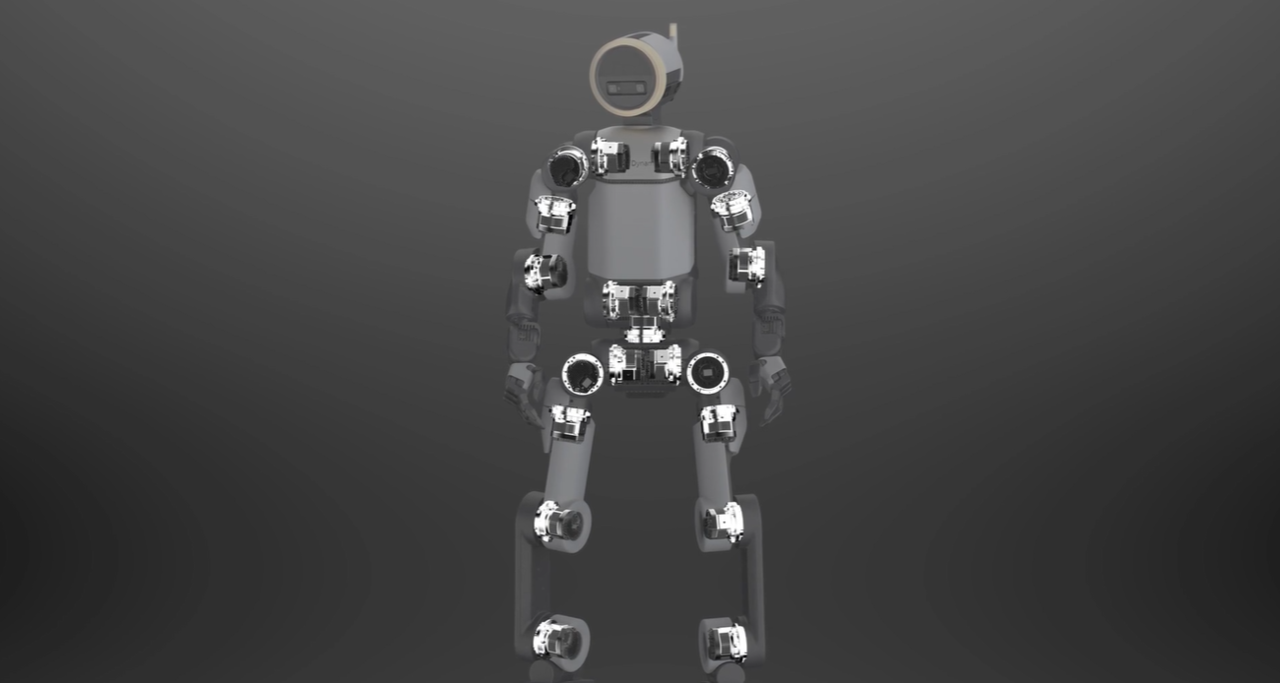
휴머노이드 ‘아틀라스’는 기존 인간형 로봇과 확연히 다른 외형을 갖는다. 눈·코·입 대신 머리에는 원형 라이트 링이 자리 잡았고, 팔다리 구조 역시 인간과는 거리가 있다. 기능에 외형을 맞춘 결과 인간형 로봇임에도 인간의 외형을 의도적으로 배제해 설계했다.
이 같은 접근은 아틀라스의 상징인 원형 라이트 링에서 가장 잘 드러난다. 얼굴을 대신하는 이 구조는 눈·코·입 대신 빛으로 상태를 표현하는 사용자 인터페이스(UI) 역할을 한다. 두꺼운 실리콘 재질로 제작돼 충돌 시 충격을 완화하는 기능도 갖췄다. 여기에 고개를 끄덕이는 수준의 제한적 움직임을 더해 최소한의 반응 표현만 남겼다.
애브로프 총괄은 “얼굴을 만들지 않고도 최소한의 인지성을 제공하고 싶었다”며 “빛을 활용해 로봇의 상태와 반응을 표현하는 것이 핵심”이라고 말했다.
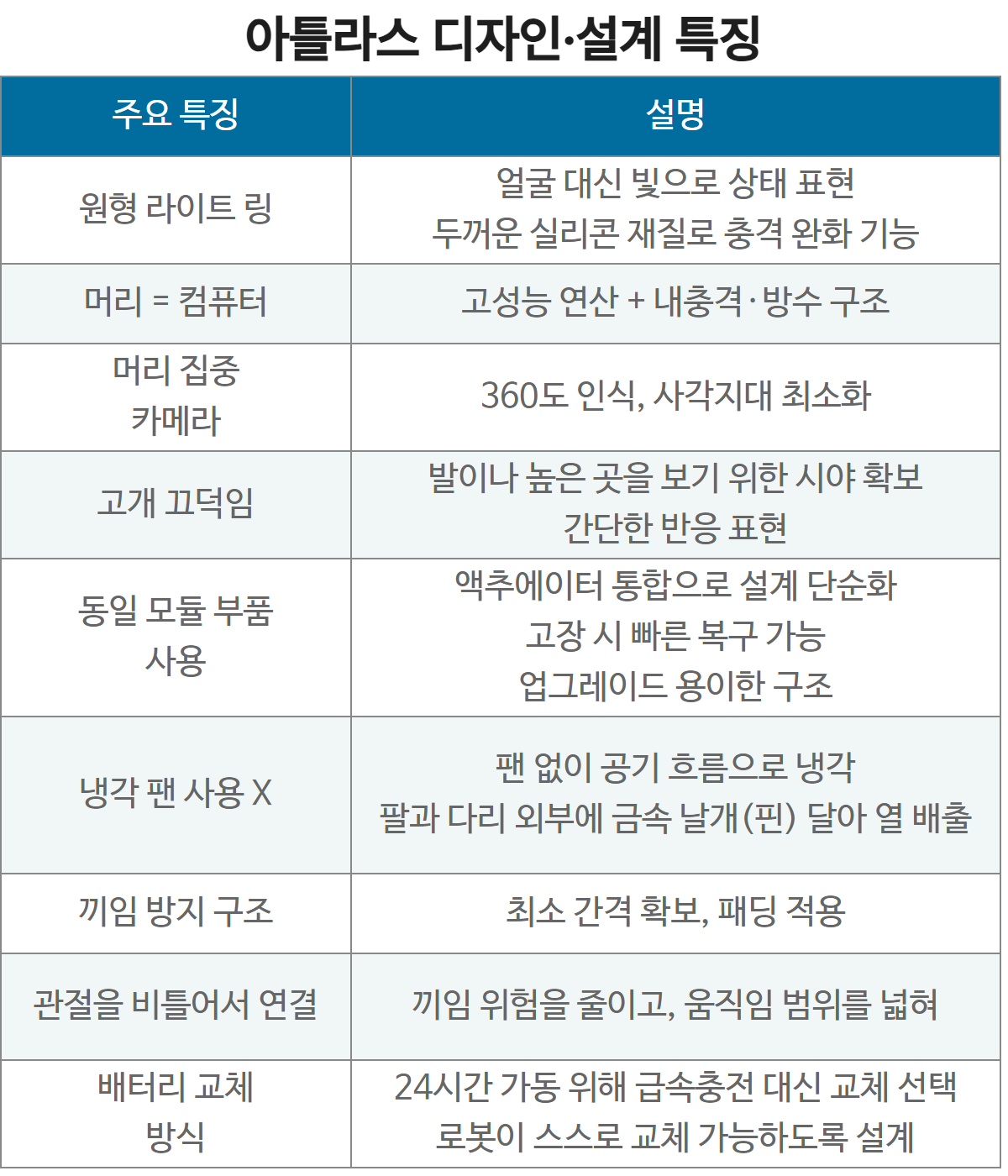 |
| 아틀라스 디자인·설계 특징 |
센서 구조 역시 인간과 다른 방식으로 설계됐다. 카메라는 머리 부분에 집중 배치됐다. 높은 위치에 카메라를 배치함으로써 몸체나 팔에 의해 시야가 가려지는 사각지대를 줄이고, 360도에 가까운 인식 능력을 확보했다.
목의 상하 움직임 역시 단순한 제스처가 아니라, 로봇이 발 주변이나 높은 작업 공간을 인식하기 위한 기능적 요소다. 또한 머리에는 고성능 컴퓨터가 탑재돼 센서 데이터를 처리하고 로봇의 인식·판단 기능을 담당한다.
 |
| 보스턴다이나믹스의 휴머노이드 로봇 ‘아틀라스’가 자동차 조립 공정 작업을 하고 있다. [보스턴다이나믹스 제공] |
로봇의 외형을 바꾼 또 다른 요인은 ‘모듈화’다. 보스턴다이내믹스는 기존 대비 2~5배 성능을 높인 액추에이터를 기반으로, 동일 부품을 전신에 적용하는 구조를 채택했다.
그 결과 어깨와 골반, 팔과 다리 구조가 유사해지고 좌우 팔다리도 동일 부품으로 구성됐다. 이는 설계를 단순화할 뿐 아니라 유지보수 효율을 높이는 효과를 낳는다. 크리스 손 보스턴다이나믹스 하드웨어 혁신 디렉터는 “단일 팔 부품을 양쪽에 모두 사용할 수 있고, 제한된 종류의 모터만으로도 대부분의 수리가 가능하다”며 “고장 난 부위를 빠르게 교체해 다시 투입할 수 있다”고 강조했다.
로봇이 넘어지거나 약 2m 높이에서 충격을 받는 상황을 고려해, 실리콘 소재로 충격을 완화하고 핵심 부품을 보호하며 빠르게 복구할 수 있도록 설계됐다.
 |
| 보스턴다이나믹스의 휴머노이드 로봇 ‘아틀라스’에 관절 부위에 적용된 고성능 액추에이터 구조. 관절 전반에 동일 부품을 사용하는 모듈형 설계가 특징이다. [보스턴다이나믹스 제공] |
열관리 방식도 기존 로봇과 차별화된다. 아틀라스는 머리를 제외하면 별도의 냉각 팬을 사용하지 않는다. 대신 공기 흐름을 활용한 자연 냉각 방식을 적용하고, 팔과 다리 외부에 열을 식히기 위한 금속 날개 구조를 배치했다.
안전 설계 역시 외형에 영향을 미쳤다. 끼임 사고를 방지하기 위해 주요 관절과 구조 사이에 충분한 간격을 확보했다. 또한 팔과 다리의 관절을 비틀어 설계해 끼임 위험을 줄이고, 그 결과 인간과 다른 비대칭적 형태를 띠게 됐다. 애브로프 총괄은 “관절 사이에 최소 1인치 이상의 간격을 확보하려 했다”며 “이는 로봇의 폭과 높이에 직접적인 영향을 미쳤다”고 말했다.
 |
| 보스턴다이나믹스의 휴머노이드 로봇 ‘아틀라스’의 다관절 그리퍼(손) 구조. 물체를 다양한 각도로 잡을 수 있도록 설계됐다. [보스턴다이나믹스 제공] |
아틀라스는 전력 운영 방식에서도 산업용 로봇의 성격을 드러낸다. 급속 충전 대신 배터리 교체 방식을 선택했다. 손 디렉터는 “공장에서 여러 대의 로봇이 동시에 급속 충전을 하면 전력 부담이 크다”며 “24시간 가동이 필요한 환경에서는 배터리 교체가 더 현실적인 선택”이라고 밝혔다. 특히 현대차 생산라인 투입을 고려해 로봇이 스스로 배터리를 교체할 수 있도록 설계했다는 점도 강조했다.
애브로프 총괄은 “단순한 휴머노이드를 만들었다면 결국 마네킹과 같은 형태에 머물렀을 것”이라며 “우리는 고객의 문제 해결에 집중했고, 그 결과 지금의 형태가 나왔다”고 말했다.
 |
| 보스턴다이나믹스의 휴머노이드 로봇 ‘아틀라스’가 자동차 조립 공정 작업을 하고 있다. [보스턴다이나믹스 제공] |










