
- 실제 로봇 실험 통해 성능 검증
 |
| 김의환(왼쪽) GIST AI융합학과 교수, 윤지애 석박통합과정생.[GIST 제공] |
[헤럴드경제=구본혁 기자] 가정용 서비스 로봇이 사용자가 자주 찾는 물건이 원래 위치에서 사라졌는지, 새로운 물건이 놓였는지, 위험할 수 있는 변화가 발생했는지를 스스로 확인할 수 있게 될 전망이다.
광주과학기술원(GIST) AI융합학과 김의환 교수 연구팀이 같은 공간을 서로 다른 시간과 경로에서 촬영한 영상을 비교해 실제 물체 변화를 자동으로 탐지하는 인공지능(AI) 모델 ‘VSCDNet’를 개발했다고 밝혔다.
자율 로봇이 실내 공간을 장기간 스스로 이동하려면 주변 환경의 변화를 지속적으로 파악할 수 있어야 한다.
실내 환경에서는 물체가 새로 등장하거나 사라지고, 위치가 바뀌며 문이나 가구의 상태가 달라지는 일이 빈번하게 발생한다. 이러한 변화는 로봇의 안전한 이동, 실내 감시, 물체 관리, 지속 학습 등에 중요한 단서가 될 수 있다. 그러나 기존 장면 변화 탐지 연구는 주로 고정된 카메라나 비슷한 시점에서 촬영된 이미지 쌍을 가정하는 경우가 많았다. 실제 로봇은 매번 동일한 경로와 시점으로 공간을 촬영하기 어렵기 때문에 서로 다른 시간과 자유로운 움직임으로 촬영된 영상 사이에서 무엇이 달라졌는지를 찾는 기술이 필요하다.
연구팀은 이러한 한계를 극복하기 위해 개별 이미지를 비교하는 대신 영상 전체의 흐름에 주목했다.
개발된 AI 모델은 같은 공간을 과거에 촬영한 기준 영상과 현재 촬영한 영상을 비교해 영상 전체에서 서로 대응되는 장면을 찾고, 실제 물체 변화가 발생한 영역만 정밀하게 탐지한다.
이를 바탕으로 변화가 발생한 영역을 시각적으로 표시한 ‘변화 마스크(Change Mask)’를 생성해 최종 변화 영역을 제시한다. 즉 노트북이 사라지거나 물체 위치가 바뀌는 등 실제 물체 변화를 자동으로 찾아낼 수 있다.
연구팀은 이 모델의 성능을 체계적으로 검증하기 위해 가상 공간과 실제 실내 환경 데이터를 포함한 대규모 데이터세트를 직접 구축했다. 데이터세트는 총 1090개의 영상으로 구성됐다.
실험 결과 ‘VSCDNet’는 가상 공간 데이터세트와 실제 실내 환경 데이터세트에서 기존 변화 탐지 기법과 비교했을 때 가장 우수한 성능을 기록했다. 영상 길이와 화질, 변화한 물체 수가 달라지는 다양한 조건에서도 안정적인 탐지 성능을 유지했다.
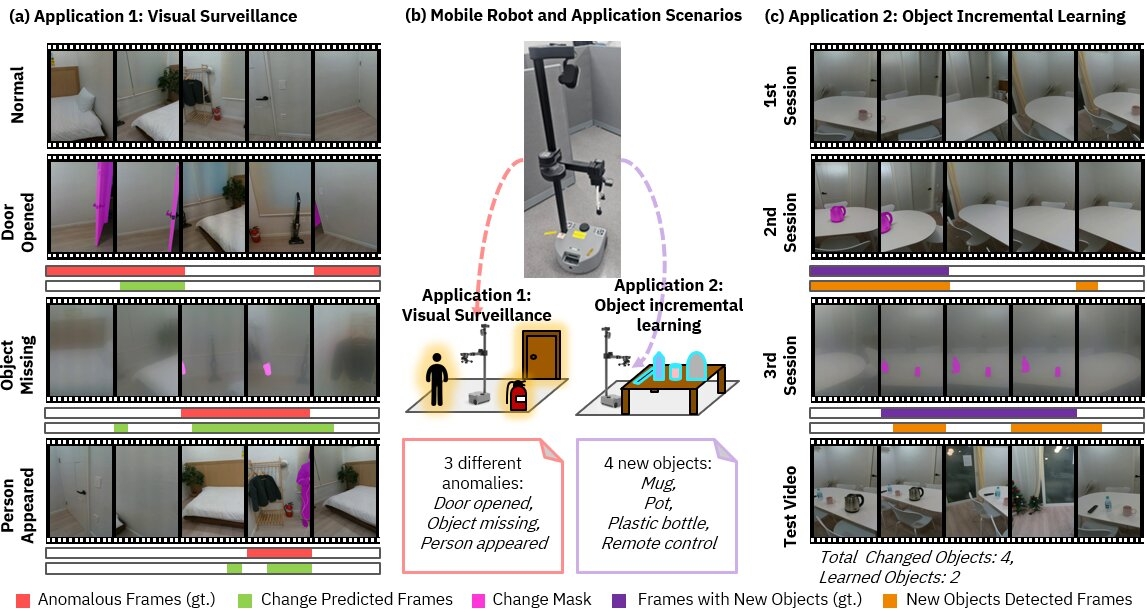 |
| 실제 로봇 환경에서의 VSCD 활용 예시. 모바일 로봇이 같은 공간을 반복적으로 방문하며 촬영한 영상을 비교해, 문이 열리거나 물체가 새로 등장·사라지는 변화를 찾아낸다. 탐지된 변화 영역은 시각 감시와 객체 증분 학습에 활용될 수 있다.[GIST 제공] |
또한 실제 모바일 로봇을 활용한 실험에서는 로봇이 다른 경로로 이동하며 촬영한 영상 속에서 문이 열리거나 물체가 사라지는 상황을 자동으로 감지했으며, 새롭게 등장한 물체를 기억하고 학습하는 기능도 확인했다.
향후 실내 순찰 로봇, 스마트 보안 감시, 시설 관리, 사물인터넷(IoT) 기반 스마트 실내 시스템 등 다양한 분야에 활용될 것으로 기대된다.
김의환 교수는 “VSCDNet는 현재 장면을 인식하는 것을 넘어 과거와 비교해 무엇이 달라졌는지를 스스로 파악하는 AI 모델”이라며 “별도의 위치 정보나 공간 지도 없이도 서로 다른 경로에서 촬영한 영상을 비교할 수 있어 실내 순찰 로봇, 스마트 보안 감시, 시설 관리 등 다양한 분야에 활용될 것으로 기대한다”라고 말했다.
이번 연구결과는 오는 7월 6일 열리는 AI·기계학습 분야 국제학회인 ‘ICML 2026(International Conference on Machine Learning)’에서 발표될 예정이다.










