
‘200㎏도 번쩍’ 재난현장 로봇팔
하지마비 장애인 걷게 하는 슈트
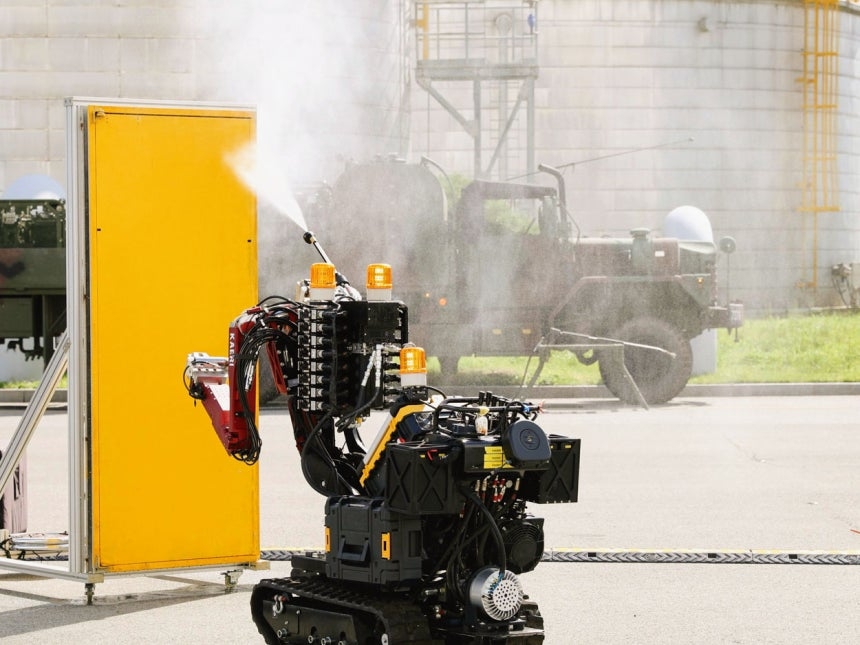 |
| 한국원자력연구원 암스트롱 로봇이 방사능 방재 훈련을 하고 있다 [한국원자력연구원 제공] |
최근 각종 재난현장에서 활약하게 될 재난로봇 분야 기술발전도 눈부시다.
오준호 명예교수가 개발한 재난로봇 DRC 휴보+는 지난 2015년 ‘DARPA 로보틱스 챌린지’ 결선대회에서 최종 우승하면서 세계 최고의 재난로봇이라는 명예를 차지했다.
DRC 휴보+는 국, 일본, 독일 등 전 세계 24개국 로봇들과 ▷운전하기 ▷차에서 내리기 ▷문열고 들어가기 ▷밸브 돌리기 ▷드릴로 구멍 뚫기 ▷돌발 미션 ▷장애물 돌파하기 ▷계단 오리기 등 8개 미션을 각각 수행했다.
휴보는 1차 대회에서 벽에 구멍 뚫기 미션에서 시간을 지체해 7점을 획득해 6위에 머물렀지만 결선 대회에서 8점, 44분 24초의 기록으로 최종 우승을 차지했다.
오 교수는 “로봇의 기술적 한계는 인류의 직면한 과학적 문제로 자율적으로 판단할 수 있는 인공지능, 인공근육, 원격제어, 고온에 견딜 수 있는 소재 등의 여러 가지 난제를 극복해야 한다”면서 “앞으로 방사능 재난현장이나 우주정거장에 외부 수리가 필요한 곳 등 극한환경에서 사람을 대신한 재난로봇의 효용성이 커질 것”이라고 강조했다.
한국원자력연구원은 원전이나 화학물질 유출 사고현장에 사람대신 투입돼 작업을 가능케 하는 무인방재로봇을 개발해 선보였다. 사고대응 로봇인 ‘암스트롱’은 유압시스템을 적용해 양 팔로 총 200㎏ 하중의 물건을 자유롭게 움직이고 무한궤도로 험지 이동이 가능하다. 무거운 콘크리트나 폐기물 드럼을 취급하고 소화수를 분사하거나 잔해물 처리, 밸브 조작이 필요한 사고 현장에서 특히 유용하다.
조정산 한국생산기술연구원 박사팀은 200㎏의 장애물도 거뜬히 옮길 수 있는 재난현장용 ‘로봇팔’을 개발했다. 이 강철 로봇팔은 재난현장에서 소방관들의 안전을 보호하면서 어렵고 복잡한 구조작업을 신속하게 수행할 수 있도록 해줄 것으로 기대된다.
 |
| 완전마비 장애인인 김승환 KAIST 연구원이 ‘2025 이노베이트코리아’에서 공경철 KAIST 교수가 개발한 웨어러블 로봇을 시연하고 있는 모습. [헤럴드 DB] |
장재호 한국생산기술연구원 박사팀은 사람의 하체에 착용하는 가볍고 유연한 외골격 소방관용 근력지원 로봇 ‘하이퍼R1’을 개발했다. 이 웨어러블 로봇은 현장작업 분석을 토대로 근로자가 쉽게 착용할 수 있는 외골격 구조로 되어 있으며, 탑재된 고출력 구동기가 허리, 다리 등 특정 부위에 힘이 가해질 때마다 근력을 보조해 신체가 받는 하중을 분산시켜준다.
소방관들이 이 로봇을 착용하면 산소통 2개를 메고도 가뿐하게 계단을 오를 수 있게 된다.
KAIST와 엔젤로보틱스 연구진이 하반신마비 장애인용 웨어러블 로봇의 새로운 버전, 워크온슈트 F1을 공개했다. 워크온슈트는 공경철 KAIST 기계공학과 교수(엔젤로보틱스 의장) 연구팀이 2015년부터 지속적으로 연구해 온 하반신마비 장애인을 위한 웨어러블 로봇이다.
특히 착용자 스스로 로봇을 착용할 수 있도록 스스로 걸어와 휠체어에서 도킹할 수 있는 기능을 구현했다. 이 과정에서 모든 부품을 국산화했고, 모든 기초기술을 내재화했다.
구본혁 기자










